
Arduino: käytä askelmoottoria - miten se toimii
Askelmoottori ei käänny, kun jännite kytketään, mutta se vie pieniä askelia. Arduinolla voit helposti hallita tällaista moottoria. Voit selvittää, miten tämä tehdään tästä käytännöllisestä vinkkiä.
Arduino: käytä askelmoottoria - miten se toimii
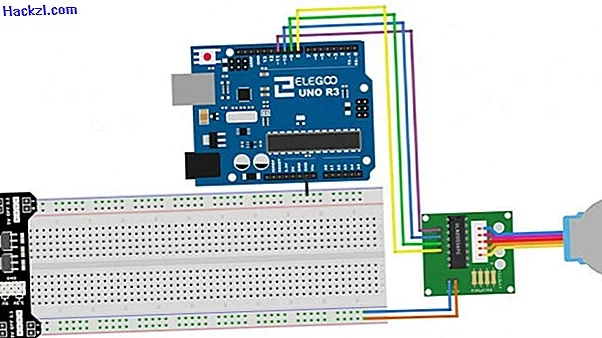
Askelmoottori on sähkömekaaninen laite, joka muuntaa sähköiset impulssit erillisiksi mekaanisiksi liikkeiksi. Tällaisen askelmoottorin ohjaamiseksi Arduinolla tarvitset askelmoottorin kuljettajakortin. Kytke kaikki komponentit kuvan osoittamalla tavalla.
- Sinun on tuotava sitten vaadittava kirjasto käyttämällä #include-komentoa.
- Komennolla "const int stepsPerRevolution = 1500;" määritä, kuinka monta askelta moottorin tulisi suorittaa yhdessä kierrossa.
- Riippuen siitä, kuinka yhdistit askeltajan, sinun on luotava uusi askelobjekti. Voit tehdä tämän komennolla "Stepper myStepper (stepsPerRevolution, 8, 10, 9, 11);".
- Aseta nyt nopeus asennusmenetelmässä: "myStepper.setSpeed (20);".
- Nyt voit käyttää askelta komennolla "myStepper.step (stepsPerRevolution);" sanotaan, että tämän pitäisi kääntyä täyteen myötäpäivään.
Seuraavassa artikkelissa selitämme kuinka määrittää GSM-moduuli Arduinolle.